Overview
Authors: Harrison Field, Max Yang, Yijiong Lin, Efi Psomopoulou, David Barton, Nathan F. Lepora
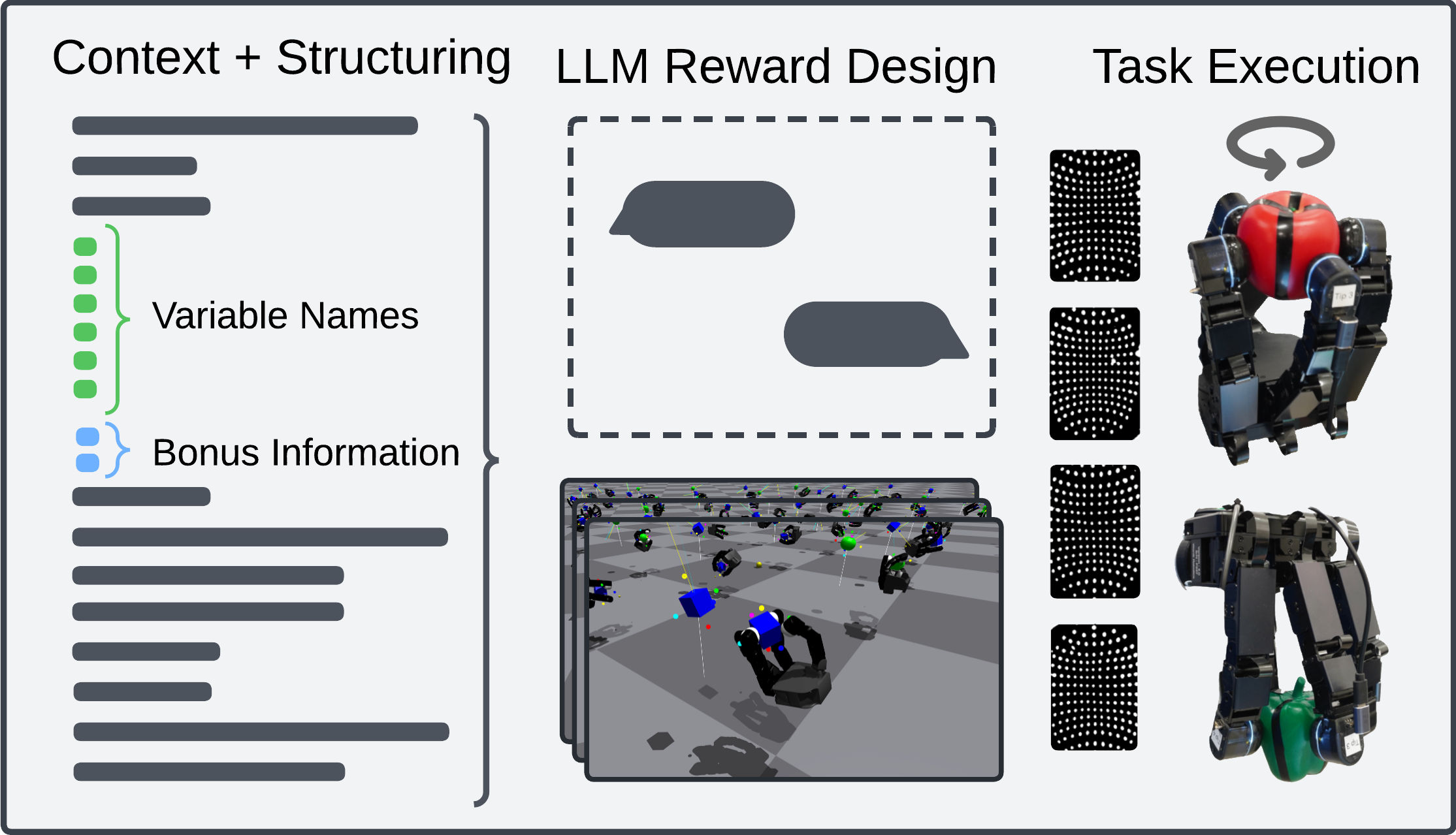
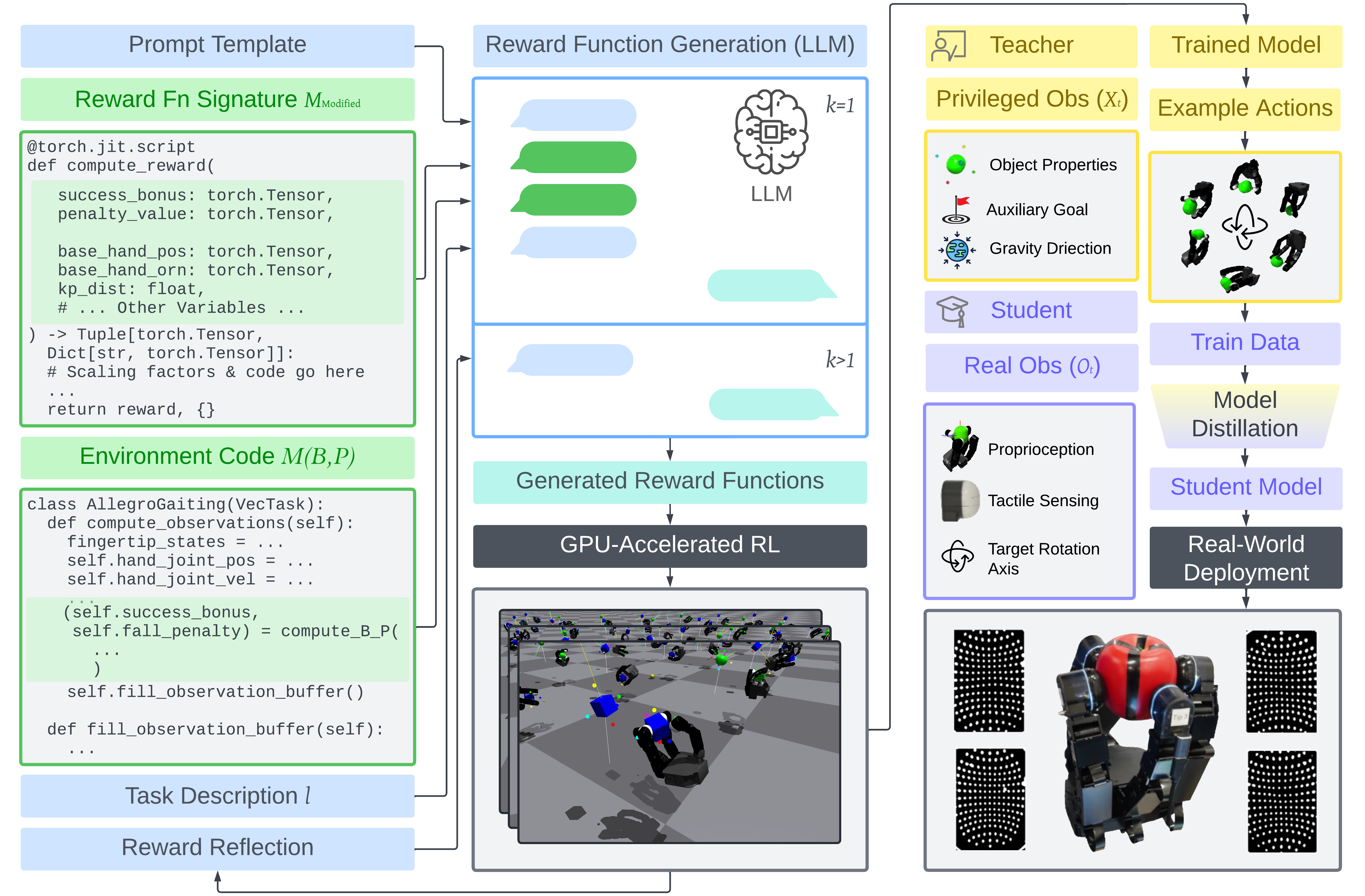
Abstract: Large language models (LLMs) are begining to automate reward design for dexterous manipulation. However, no prior work has considered tactile sensing, which is known to be critical for human-like dexterity. We present Text2Touch, bringing LLM-crafted rewards to the challenging task of multi-axis in-hand object rotation with real-world vision based tactile sensing in palm-up and palm-down configurations. Our prompt engineering strategy scales to over 70 environment variables, and sim-to-real distillation enables successful policy transfer to a tactile-enabled fully actuated four-fingered dexterous robot hand. Text2Touch significantly outperforms a carefully tuned human-engineered baseline, demonstrating superior rotation speed and stability while relying on reward functions that are an order of magnitude shorter and simpler. These results illustrate how LLM-designed rewards can significantly reduce the time from concept to deployable dexterous tactile skills, supporting more rapid and scalable multimodal robot learning.
Project Video
Reward Functions
Select an approach to view its best reward function code:
// Placeholder reward function code will appear here.
Real-World Policy Videos
Available objects: apple, box, cream, dolphin, duck, lemon, mints, orange, peach, pepper
Rotation axes: x, y, z | Hand orientations: Palm-up (up), Palm-down (down)
Select parameters to view policy videos side by side:
Baseline
GPT-4o
Gemini-1.5-Flash
Deepseek-R1-671B
Key Tables & Results
Prompt Strategies Comparison
| Prompting Strategy |
GPT-4o | o3-mini | Gemini-1.5-Flash | Llama3.1-405B | Deepseek-R1-671B | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Rots/Ep | Solve Rate | Rots/Ep | Solve Rate | Rots/Ep | Solve Rate | Rots/Ep | Solve Rate | Rots/Ep | Solve Rate | ||||||
| Best | Avg | Best | Avg | Best | Avg | Best | Avg | Best | Avg | ||||||
| Bonus/Penalty+ Mod | 5.46 | 5.34 | 84% | 5.38 | 5.26 | 28% | 5.48 | 5.29 | 31% | 5.41 | 5.28 | 10% | 5.08 | 5.03 | 16% |
| Bonus/Penalty | 0.10 | 0.09 | 0% | 0.17 | 0.17 | 0% | 0.04 | 0.02 | 0% | 5.42 | 5.23 | 10% | 5.26 | 5.12 | 16% |
| Mod template | 0.17 | 0.16 | 0% | 0.17 | 0.12 | 0% | 0.10 | 0.09 | 0% | 0.02 | 0.01 | 0% | 0.16 | 0.16 | 0% |
| Original | 0.17 | 0.15 | 0% | 0.18 | 0.14 | 0% | 0.17 | 0.17 | 0% | 0.18 | 0.13 | 0% | 0.15 | 0.13 | 0% |
Highest 360° rotations per episode (Rots/Ep) split into best, average and overall frequency of episodes with s > 1 (Solve Rate) across 5 LLMs and 4 prompting strategies.
LLM Statistics
| LLM | Performance | Code Quality | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Rots/Ep ↑ | EpLen(s) ↑ | Corr | GR ↑ | Vars ↓ | LoC ↓ | HV ↓ | ||||||
| Best π* | Avg | π* | Avg | π* | Avg | π* | Avg | π* | Avg | π* | Avg | |
| Baseline | 4.92 | 4.73 | 27.2 | 26.8 | 1 | - | 66 | - | 111 | - | 2576 | - |
| Gemini-1.5-Flash | 5.48 | 5.29 | 24.1 | 23.8 | 0.40 | 0.76 | 7 | 6.3 | 24 | 22.6 | 370 | 301 |
| Llama3.1-405B | 5.41 | 5.28 | 23.7 | 23.2 | 0.35 | 0.45 | 5 | 6.6 | 31 | 22.5 | 211 | 233 |
| GPT-4o | 5.46 | 5.20 | 24.4 | 23.4 | 0.30 | 0.63 | 8 | 8.1 | 35 | 26.9 | 317 | 300 |
| o3-mini | 5.38 | 5.26 | 23.9 | 23.1 | 0.47 | 0.92 | 6 | 6.6 | 27 | 30.1 | 281 | 302 |
| DeepseekR1-671B | 5.26 | 5.12 | 22.9 | 22.4 | 0.42 | 0.93 | 12 | 11.9 | 43 | 45.3 | 994 | 699 |
Comparison of LLM-generated and human-designed reward functions when used to train models with privileged information in simulation. Performance: Rotations per episode (Rots/Ep), episode lengths (EpLen(s)), reward correlation with baseline (Corr) and generation rate of runnable code (GR) of the model with the highest Rots/Ep (π*) and the average over that reward function’s repeated training runs. Code Quality: For the reward function producing π* and the average over all trained reward functions, we record the variables used from the environment (Vars), the lines of code in the function body (LoC) and the Halstead Volume (HV).
Distilled Observation Models
| LLM | OOD Mass | OOD Shape | ||
|---|---|---|---|---|
| Rots/Ep ↑ | EpLen(s) ↑ | Rots/Ep ↑ | EpLen(s) ↑ | |
| Baseline | 2.94 | 23.0 | 2.44 | 25.1 |
| Gemini-1.5-Flash | 3.38 | 19.8 | 2.68 | 21.3 |
| GPT-4o | 3.35 | 20.7 | 2.62 | 22.5 |
| o3-mini | 3.25 | 19.2 | 2.52 | 21.3 |
| Llama3.1-405B | 3.02 | 18.1 | 2.50 | 20.0 |
| Deepseek-R1-671B | 3.32 | 22.7 | 2.47 | 23.4 |
Tactile and proprioceptive observation models distilled from privileged agents (π* in Table 1). We report on average rotation achieved per episode (Rots/Ep) and average episode length (EpLen, max 30) for arbitrary rotation axis and hand direction.
Real-World Policy Results
| Approach | Palm Up Z | Palm Down Z | Palm Up Y | Palm Down Y | Palm Up X | Palm Down X | Total Avg | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Rot | TTT | Rot | TTT | Rot | TTT | Rot | TTT | Rot | TTT | Rot | TTT | Rot | TTT | |
| Human-engineered Baseline | 1.42 | 22.1 | 0.96 | 17.2 | 1.04 | 23.4 | 0.67 | 24.0 | 1.23 | 19.0 | 0.65 | 14.1 | 0.99 | 20.0 |
| GPT-4o | 2.34 | 26.5 | 1.67 | 23.1 | 1.00 | 27.1 | 0.46 | 16.9 | 0.92 | 14.9 | 0.73 | 15.6 | 1.18 | 20.7 |
| Gemini-1.5-Flash | 2.12 | 26.9 | 1.19 | 19.0 | 1.00 | 26.2 | 0.61 | 27.5 | 1.47 | 21.4 | 1.31 | 21.5 | 1.28 | 23.8 |
| Deepseek-R1-671B | 2.45 | 27.6 | 1.00 | 23.1 | 0.97 | 21.6 | 1.78 | 27.7 | 1.08 | 30.0 | 0.92 | 20.4 | 1.37 | 25.1 |
Real-World average full rotations (Rot) and Time To Terminate (TTT, maximum 30s) in seconds across all objects, per approach and hand orientation.

Simulation / Real World Object Set
